I. Pêşgotina Sîstemê
1. Paşxaneya Projeyê
Di salên dawî de, veguhestina neqanûnî ya wesayîtên barhilgir ên li ser rêyên sereke bûye pirsgirêkek cidî ku ewlehiya trafîkê ya rêyên neteweyî dixe xeterê. Ew dibe sedema zêdebarîkirina otoban û piran, temenê karûbarê rê û piran pir kêm dike; di heman demê de, faktora ewlehiya wesayîtan pir kêm dibe, bi berdewamî dibe sedema qezayên trafîkê; her weha dibe sedema qerebalixiya trafîkê û qirêjiya jîngehê jî hêsan e.
Hikûmetên li hemû astan li seranserê welêt bi berdewamî hewlên xwe ji bo kontrolkirina veguhestina zêdebar a wesayîtên otobanê zêde kirine û encamên girîng ên qonax bi dest xistine. Lêbelê, ji ber faktorên civakî û aborî yên tevlihev, rewşa tespîtkirina zêdebar a neteweyî hîn jî pir giran e, û xetereyên veşartî yên vegerê nehatine rakirin; yekkirina encamên rêveberiyê û pêşvebirina berdewam a xebata tespîtkirina zêdebar hîn jî di bin zextek mezin de ye. Ji ber vê yekê, rêveberiya veguhestina zêdebar a wesayîtan karekî demdirêj û rojane ye, ku divê berdewam bike. Girîng e ku rêveberiya karê zêdebar di mekanîzmayek demdirêj de were bicîh kirin. Ew di heman demê de rolek astengkirina qanûnî li ser wesayîtên zêdebar dilîze, û di heman demê de dikare fonksiyonên xwe berfireh bike da ku ew bibe teftîşa rê, li dijî zîhniyeta bêserûber a operasyonên veguhestina neqanûnî têk bibe, û di wextê xwe de kontrol bike û operasyonên veguhestina neqanûnî yên cûrbecûr, di nav de veguhestina zêdebar, ji holê rake.
2. Pêşgotinek li ser sîstema giraniyê
Prensîba giraniya pîvana kamyonê ya statîk ew e ku hemû wesayît li ser platforma giraniyê werin parkkirin da ku tevahiya wesayîtê were girankirin. Ew xwedî rastbûna giraniya bilind û standardên neteweyî yên zelal e. Lêbelê, pîvana kamyonê ya kevneşopî tenê dikare giraniya tevahiya wesayîtê bipîve, lê giraniya axlê ne. Ew dikare binirxîne ka tevahiya wesayîtê zêde barkirî ye an na, lê nikare binirxîne ka giraniya axlê zêde barkirî ye an na. Ew nikare pêdiviyên daîreya rêveberiya rêyan ji bo pêkanîna armanca birêvebirina veguhastina zêde barkirî bicîh bîne.
Ev plan bi salan ezmûna pargîdaniya me di sêwirandin û çêkirina alavên tespîtkirina zêdebarkirinê û sepandina wê ya rastîn li herêmên cûda yên welêt de tîne cem hev, bi baldarî karanîna alavên tespîtkirina zêdebarkirinê yên cûrbecûr li sûkê lêkolîn dike, û bi berfirehî hewcedariyên taybetî yên beşên rêveberiya rêyan ji bo rêveberiya veguhastina zêdebarkirinê dinirxîne. Ew teknolojiya pêşkeftî û ramanên sêwirana bêhempa dipejirîne da ku pergala tespîtkirina giraniya wesayîtê û celebê axlê ya dînamîk a rastbûna bilind pêş bixe. Ew dikare hem giraniya axlê û hem jî giraniya giştî bipîve, û dikare celebê axlê ji hev cuda bike. Rastbûna giraniya axlê jî dikare pir were baştir kirin.
2. Pêkhatina sîstema zêdebarkirin û zêdesînorkirinê
1. Taybetmendiyên sîstemê
Ew dikare wesayîtên ku bi leza nizm derbas dibin bipîve û bixweber diyar bike ka giraniya wesayîtê an giraniya axlê zêde bargiran e;
Ew dikare hejmara axên, koma axên, giraniya axên û giraniya wesayîtê ya wesayîtê tespît bike;
Ew dikare agahdariya giraniya wesayîtê ya tevahî, di nav de celebê axle, giraniya axle, koma axle û giraniya giştî, çêbike;
Ew dikare agahdariya giraniyê bi riya navrûya daneyan veguhezîne komputerê;
Beşa bingehîn a pergalê alavên gihîştî û pêbawer bikar tîne, ku hemî jî sêwirana modular qebûl dikin, parastin û berfirehkirina wan hêsan e, û pêbaweriya bilind a pergalê misoger dikin.
Nermalava pergalê gihîştî ye, pir pêbawer e, daneyên wê bêkêmasî û bibandor in, û ew dikarin bi tevahî werin parvekirin, bi vî rengî karîgeriya kar bi bandor baştir dike û gelek kêmasiyên rêveberiyê heya radeyek herî mezin ji holê radike.
2. Pêvajoya sîstemê
Kamyon têxe rêza pîvandinê ya îstasyona zêdebarkirinê, û pergala naskirina plakaya wesayîtê jimareya plakaya wesayîtê destnîşan dike;
Nasnameya lastîkê (eksê) hejmara eksan ji hev vediqetîne, û pergala giraniya wesayîtê dest bi giranîkirin, destnîşankirina koma eksê, û hesabkirina giraniya eksê dike.
Dema ku hemû wesayît ji cihêkara wesayîtan derbas dibin û dikevin platforma giraniyê, û terazû di rewşek nisbeten hevseng de ye, giraniya giştî ya wesayîtê tê tomar kirin û giraniya axlê tê hesibandin.
Sîstema pîvandinê agahiyên pîvandinê (jimara plakaya wesayîtê, hejmara axên, giraniya axên, giraniya giştî ya wesayîtê, hwd.) dişîne komputerê tespîtkirinê. Komputer diyar dike ka ew ji sînor derbas bûye an na û agahiyên tespîtkirinê yên wekî giraniya wesayîtê, ji sînor derbas bûye, û rêjeya ji sînor derbas bûye li ser ekranê nîşan dide.
Piştî ku wesayît operasyonên têkildar temam dike, personelên rêberiya wesayîtan wesayîtên ne-zêde-sînorkirî li gorî agahdariya li ser ekranê berdidin da ku ji qada tespîtkirinê derkevin, wesayîtên zêde-sînorkirî rêberî dikin ku ji bo pêvajoyê têkevin qada îstasyonê, forma teftîşa wesayîta zêde-sînorkirî çap dikin, û operasyonên barkirinê yên têkildar pêk tînin;
3. Pêkhate û plana sêwirandinê ya sîstemê
3.1 Pêkhateya sîstemê
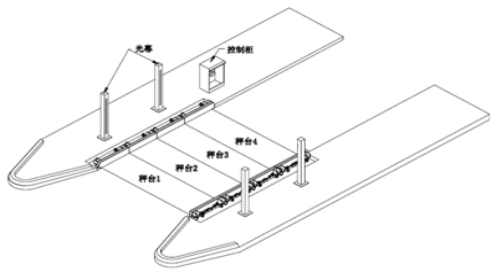
Sîstema zêde-sînor û zêdebarkirinê ji pîvana giraniya eksê dînamîk a çar-maseyî ya ZDG, amûra kontrolê, veqetandina wesayîta înfrared, nasnameya eksê çerxa platforma giraniyê, kabîneya kontrolê, (amûrên vebijarkî: pergala naskirina plakaya lîsansê, pergala nîşandana ekrana mezin a LED, pergala fermana deng, pergala rêberiya wesayîtê, komputera pîşesaziyê, çapkerê bilêtê, dabînkirina hêza bênavber a UPS, nermalava pergala tespîtkirina zêde-sînor û zêdebarkirinê, pergala çavdêriyê) û aksesûar û kabloyên din pêk tê.
3.2 Nexşeya sêwirana sîstemê wekî ku tê xuyang kirin:
Herikîna Kar:
1) Wesayît bi rêzê dikevin rêyê dema ku mesafeyek ewle diparêzin, û veqetînera wesayîtê ya înfrared çalak dikin;
2) Her axê wesayîtê ji platforma pîvandina pir-rûyî derbas dibe;
3) Kontrolkera dîmenderê sînyala giraniya ku ji sensora platforma giraniyê û sînyala sensora teker tê wergirtin pêvajo dike, axlê li gorî şert û mercên mentiqî ji hev vediqetîne, û bi bandor rewşên taybetî birêve dibe;
4) Paşiya wesayîtê ji platforma pîvandina pir-rû û veqetînera wesayîtê ya înfrared derdikeve;
5) Kontrolkera dîmenderê li gorî nîşana girtina ku ji hêla veqetandina wesayîta înfrared ve hatî tespît kirin û nîşana giraniyê ya ku ji hêla sensora giraniyê ve hatî bidestxistin, bi berfirehî sînyala dawiya wesayîtê dinirxîne;
6) Kontrolkera dîmenderê sînyala giraniyê ya ku dema wesayîta jorîn ji platforma giraniyê derbas dibe tê bidestxistin, pêvajo dike;
7) Kontrolkera dîmenderê agahdariya giraniya tevahî ya tevahiya wesayîtê nîşan dide, û agahdariya giraniya tevahî leza wesayîtê, celebê axlê, giraniya axlê, giraniya koma axlê, giraniya giştî, hwd. vedihewîne;
٨) Pêvajoya pîvandina yek wesayîtê temam bike û li benda pîvandina wesayîta din be
9) Di tevahiya pêvajoya xebatê de, pergal bixweber rewşên taybetî yên cûrbecûr birêve dibe, wekî têketin û derketina tevahî, ketin û derketina dubare, û mayîna dirêj li ser platforma giraniyê;
Sîstem dikare rewşa wesayîta jêrîn bi awayekî otomatîk û bi bandor birêve bibe, û giraniya wesayîta jêrîn bandorek li ser rastbûna daneyan nake.

Dema şandinê: 20ê Sibatê 2025