Bi zêdebûna bilez a daxwaza veguhastina rêyan re, wesayîtên zêde barkirî ji bo rê, pir, tunelan û ewlehiya giştî ya trafîkê xetereyên girîng çêdikin. Rêbazên kontrola zêdebarkirinê yên kevneşopî, ji ber agahdariya parçebûyî, karîgeriya kêm û bersiva hêdî, her ku diçe nikarin hewcedariyên rêziknameyê yên nûjen bicîh bînin. Di bersivê de, pargîdaniya me pêşxistiyeSîstema Agahdariya Rêvebiriya Kontrola Zêdebarî ya Smart, bi karanîna teknolojiya agahdariyê, torê û teknolojiyên jîr ji bo bidestxistina berhevkirina daneyên navendî, rêveberiya dînamîk, berawirdkirina rast-dem, analîza jîr û pêvajoya otomatîk. Ev sîstem amûrên bikêrhatî û rast ji bo kontrolkirina zêdebargirtinê, misogerkirina ewlehiya rê û domdariya binesaziyê pêşkêşî rayedarên rêveberiya trafîkê dike.
Sîstema me di çarçoveyek asta neteweyî de hatiye sêwirandin, avahiyek kontrol û çavdêriya zêdebarkirinê ya berfireh, tam-dem, zincîra tevahî û herêma tevahî ava dike. Ew girêdan û parvekirina daneyan di navbera stasyonên çavkaniyê, rêyên sabît, bicîhanîna rêyên mobîl û navenda kontrola navendî ya neteweyî de gengaz dike, modelek rêziknameyî ya pêvajoyek tevahî ji barkirina çavkaniyê bigire heya xebitandin û bicîhanîna rê ava dike. Bi rêya çavdêriya teknolojîk, hevkariya daneyan û bicîhanîna çerxa girtî, pergal bi bandor zêdebarkirinê li çavkaniyê kontrol dike, piştrast dike ku rê di nav temenê xizmetê de dimînin, xebitandina wesayîtên birêkûpêk û baca adil pêş dixe, û binesaziya veguhastinê û berjewendiyên neteweyî diparêze.
Sîstema giştî ji çar modulên fonksiyonel ên sereke pêk tê: Sîstema Kontrolkirina Zêdebariya Îstasyona Çavkaniyê, Sîstema Kontrolkirina Zêdebariya Rêya Sabît (otoban + rêyên neteweyî, parêzgeh, şaredarî û wîlayetan), Sîstema Kontrolkirina Zêdebariya Rêya Mobîl, û Sîstema Rêveberiya Baca Bacê. Ev modul bi hevrêzî dixebitin da ku pergalek çavdêriya berfireh biafirînin ku tevahiya tora rêyan û hemî senaryoyan vedihewîne.
Beşa Yekem: Sîstema Kontrolkirina Zêdebarîkirina Îstasyona Çavkaniyê
Armanca sereke ya Sîstema Kontrolkirina Zêdebarî ya Îstasyona Çavkaniyê ew e ku wesayîtên zêdebar ên ku ji îstasyonên destpêkê derdikevin kêm bike an jî ji holê rake. Armancên sereke wesayîtên ji maden, bender, balafirgeh, parkên lojîstîkê, kargeh û şîrketên veguhastinê ne. Çavdêriya berdewam, 24/7 piştrast dike ku wesayît li çavkaniyê bi rêziknameyên barkirinê re lihevhatî ne.
1. Sîstema Giraniya Dînamîk a Wesayîtê ya Heşt-Platformî
Li derketinên cihên çavdêrîkirî, Sîstema Giraniya Dînamîk a Wesayîtan a Heşt-Platformî tê bicîhkirin da ku bargiraniya zêde ya wesayîtan berî ku bikevin rêyên giştî bi hişkî tespît bike. Ev sîstem ji van pêk tê:
Pîvana Wesayîta Elektronîkî ya Heşt-Platformê- Ji bo tespîtkirina dînamîk a giranî û mezinahiya wesayîtê, şaneyên barkirinê yên rastbûna bilind, naskirina dûrbûn û hejmartina axle, pîvandina pîvana wesayîtê, û veqetandina rasterê ya optîkî bikar tîne.
Sîstema Rêvebiriya Giraniya Bêmirov- Ji komputerên pîşesaziyê, nermalava rêveberiya giraniyê, kamerayên çavdêriyê, ekranên LED, rêwerzên deng, kabîneyên kontrola jîr, û pergalên torê pêk tê da ku wesayîtan bixweber nas bike, daneyan berhev bike, rewşa zêdebarkirinê diyar bike, û berdanê birêve bibe.
Herikîna Karê Operasyonel: Wesayît piştî barkirinê dikevin qada pîvandinê. Sîstem bixweber giranî û pîvanan dipîve û wan bi sînorên barkirinê yên pejirandî re berawird dike. Wesayîtên lihevhatî bixweber têne berdan, lê ji wesayîtên zêde barkirî tê xwestin ku heta ku bigihîjin standardan bar bikin. Sîstem bi platformên hikûmeta herêmî re entegre dibe da ku parvekirina daneyan û çavdêriya ji dûr ve çalak bike, û dîtina rast-dem a kontrola zêdebarkirina çavkaniyê misoger dike.
2. Sîstema Giraniya Wesayîtê ya li ser Keştîyê
Ji bo ku çavdêriya dînamîk bêtir were bidestxistin, wesayît bi Sîstema Giraniya Wesayîtên Navborî ve têne stendin, ku dikare di wextê rast de barên wesayîtên statîk û dînamîk bişopîne. Sîstem nermalava giraniya navborî, dîmenderên amûrên jîr, û yekîneyên giraniyê (cûreya dûrbûna lazer an pîvana zorê) vedihewîne, ku dihêle ajokar barkirina heyî bibînin û di dema barkirinê de hişyariyan bistînin. Ji wesayîtên zêde barkirî tê xwestin ku barkirinê dakêşin, daneyên di heman demê de li platformên rêveberiya filo û pergalên hikûmetê têne barkirin, û, ger hewce be, bixweber agahdariyên zêde barkirinê an cezayên zêde çêdikin.
Sîstem şaneyên barê daliqandinê bikar tîne da ku deformasyona biharên pelî, ax, an jî daliqandinên hewayî bişopîne û rêbazek "hest-kalîbre-hesab-bikaranîn" a çerxa girtî bikar tîne da ku modelên barê ava bike. Algorîtmayên nermalavê faktorên hawîrdorê telafî dikin, rastbûna pîvandinê misoger dikin. Rastbûna giraniya statîk digihîje ±0.1%~±0.5%, lê rastbûna giraniya nerasterast di bin şert û mercên îdeal de digihîje ±3%~±5%, ku ji bo rêveberiya operasyonel û hişyariyên rîskê guncan e.
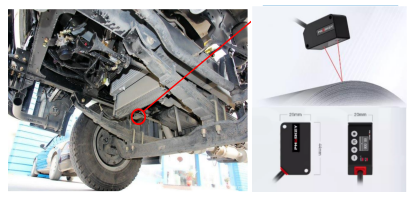
Sîstema Pîvandina Dûrbûnê ya Lazerê ya Deformasyona Çarçoveya Li Ser Çêkirî

Deformasyona Çarçoveya Li Ser Veşartinê Hatiye ÇêkirinBarkirina Hucreyê
Bi hevberkirina Sîstema Giraniya Dînamîk a Wesayîtan a Heşt-Platformî bi Sîstema Giraniya Wesayîtan a li ser Gemiyê, wesayît dikarin xwe kontrol bikin, filo dikarin xwe kontrol bikin, û rayedar dikarin tevahiya pêvajoyê çavdêrî bikin, modelek rêveberiya kontrola zêdebariya çavkaniya rast-dem bi tevahî yekgirtî diafirînin ku ewlehiya trafîkê û aramiya binesaziyê ya demdirêj misoger dike.
Dema şandinê: Kanûn-09-2025